Dalam sistem pengereman secara otomatis ini digunakan pegontrolan logika fuzzy untuk menentukan besarnya nilai persentase rem yang akan dilakukan. Untuk masukan pada logika fuzzy itu sendiri berupa kecepatan mobil pada saat melaju dan jarak antara mobil dengan hambatan di depannya. Jumlah rule yang digunakan pada pengontrolan logika fuzzy berjumlah 28 rule .Rule tersebut berisi perbandingan antara kecepatan mobil pada saat melaju dan jarak antara mobil dengan hambatan di depan sehingga menghasilkan nilai persentase rem yang sesuai dengan kondisi mobil pada saat melaju. Perancangan sistem pengereman otomatis ini dibuat dalam bentuk prototype mobil dengan menggunakan mikrokontroler Atmega 32 sebagai pemroses. Dengan menggunakan logika fuzzy dengan 28 rule, sistem yang dibuat mampu melakukan pengereman pada saat mobil melaju dengan kecepatan rendah ataupun melaju dengan kecepatan tinggi dengan jarak berhenti sekitar 10cm sampai 5cm. Selain itu sistem yang dirancang tidak mempengaruhi mobil untuk dapat melewati daerah sempit seperti garasi, dengan jarak antara hambatan bagian kanan dan bagian kiri sekitar 2cm
Kecelakaan lalu lintas adalah suatu peristiwa di jalan yang tidak disengaja, hal itu mengakibatkan korban manusia atau kerugian harta. Salah satu penyebab dari kecelakaan tersebut adalah kelalaian pengemudi pada saat mengendarai mobil, kemudian secara tiba-tiba ada obyek di depan sehingga pengemudi tidak sempat menginjak tuas rem dan mengendalikan laju mobil. Terlebih lagi mobil tersebut melaju dengan kecepatan tinggi sehingga sulit untuk menghindar. Sebelumnya telah ada penelitian mengenai sistem pengereman secara otomatis, namun pada sistem tersebut hasil pengereman yang dilakukan masih terlalu kasar sehingga mengurangi kenyamanan pengendara. Selain itu mobil tidak bisa masuk ke dalam daerah sempit seperti garasi. Maka dari itu untuk menghasilkan pengereman yang halus perlu dilakukan penambahan rule pada logika fuzzy yang digunakan, dan juga agar mobil dapat masuk ke daerah sempit.


2. Fuzzy logic inference



Sensor Ultrasonik (HC-SR04)
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).
Cara Kerja Sensor Ultrasonik:
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.

Gambar 12. Cara Kerja Sensor Ultrasonik

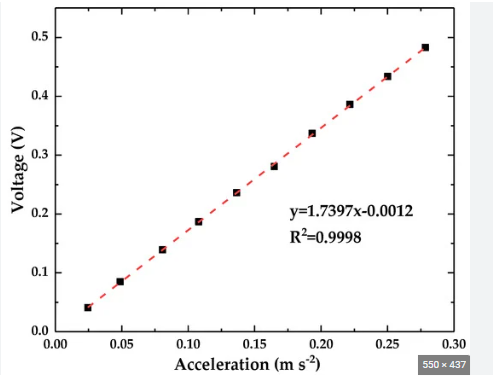
Gambar 13. Grafik Respon Sensor Ultrasonik
Berdasarkan grafik di atas dapat disimpulkan bahwa bahwa sensor ultrasonik memiliki kinerja rendah dalam pengukuranpada jarak yang rendah. Kinerja sensor memiliki hasil yang akurat untuk pengukuran jarak jauh. Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
l Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
l Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
l Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Sensor accelerometer
.jpg)

.png)
.png)


nama mf2 menjadi DekatSekali type trimf, Params [50 75 100]
nama mf3 menjadi Dekat, type trimf, Params [90 135 180]
sehingga tampilan variabel Jarak akan tampak seperti pada gambar di bawah ini:

STEP 7 : Pada variabel Kecepatan, ubahlah
range menjadi [0 120]
nama mf1 menjadi KecepatanSangatRendahSekali, type trimf, Params [0 0 15]
nama mf2 menjadi KecepatanSangatRendah, type trimf, Params [10 18 25]
nama mf3 menjadi KecepatanRendah,, type trimf, Params [20 30 35]
nama mf4 menjadi KecepatanSedang,, type trapmf, Params [30 38 64 70]
nama mf4 menjadi KecepatanTinggi,, type trapmf, Params [68 80 90]
nama mf4 menjadi KecepatanSangatTinggi,, type trapmf, Params [85 95 105]
nama mf4 menjadi KecepatanSangatTinggiSekali,type trapmf,Params[100 111.6 119.6 120]
sehingga tampilan variabel Kecepatan akan tampak seperti pada gambar di bawah ini:

STEP 8 : Pada variabel TingkatPengereman, ubahlah
range menjadi [0 100]
nama mf1 menjadi SangatSedikit, type constant, Params [20]
nama mf2 menjadi Sedikit, type constant, Params [40]
nama mf3 menjadi Sedang, type constant, Params [60]
nama mf3 menjadi Penuh, type constant, Params [80]
nama mf3 menjadi SangatPenuh, type constant, Params [100]
sehingga tampilan variabel TingkatPengereman akan tampak seperti pada gambar di bawah ini


STEP 11: Pilih view>>rules untuk melihat hasil rules yang dibuat







{kind=link}
Tidak ada komentar:
Posting Komentar